



龙8手机游戏官网:2010 Siemens PLM Software
来源:龙8手机版网页登录官网 作者:龙8官方网手机2024-09-08 08:19:08在增强国内自动冲压生产线在世界上的竞争能力的同时,将冲压线工人从繁重、单调、危险的工作环境中解放出来。济南二机床在运用先进的产品设计技术的同时,在国内第一次将虚拟仿真的先进技术应用到机器人冲压生产线的整线设计中,将产品设计凭借设计人员预测,到运用虚拟技术将设计转化为虚拟现实,从而优化设计过程。
济南二机床集团有限公司作为完整系列的冲压自动化解决方案的企业之一,其中包括机械化设备、拆垛和成品堆垛、清洗和涂油、压机更新和换模系统,济南二机床集团有限公司机器人自动冲压线水平代表冲压行业的自动化水平,同时作为国内最大、技术最先进的冲压线供应商、集成者,在自动化冲压线技术代表了国内最好,世界先进的技术水平。在增强国内自动冲压生产线在世界上的竞争能力的同时,将冲压线工人从繁重、单调、危险的工作环境中解放出来。济南二机床在运用先进的产品设计技术的同时,在国内第一次将虚拟仿真的先进技术应用到机器人冲压生产线的整线设计中,将产品设计凭借设计人员预测,到运用虚拟技术将设计转化为虚拟现实,从而优化设计过程。
机器人自动冲压生产线虚拟仿真技术是借助虚拟设计技术、机器人技术与计算机技术结合,并综合运用多媒体手段在虚拟环境中对冲压生产线各元素、生产过程等进行仿真模拟,有效的模拟机器人自动化冲压线生产制造的过程、预测产品性能、产品的可制造性,用更加经济、有效的方式对冲压自动化生产线进行合理配置,降低设备投资风险的先进的计算机辅助技术。冲压生产线的设计包括两大部分内容:全新的生产线设计和改造设计已有的生产线。传统设计往往存在以下的问题: 传统设计手段只能专门针对某几个问题作单方面的分析与设计, 不能对系统全局进行优化; 用文字或数字对冲压生产线进行表达,不能清楚表述制造系统的动态特性; 手工计算, 图形拼凑, 对设计者的经验依赖性强; 对于冲压车间的一些实际存在的问题(如路径优化和碰撞检测等问题) ,很难确切地预知其对未来实际生产的影响。
而虚拟设计除了包含传统设计方法的主要内容外, 还可预演设计许多新的内容, 如机器人送料姿态、送料路径、干涉分析、机器人各轴送料角度、与压力机动作配合等。它在所见即所得的虚拟设计环境中对组成冲压生产线的主要元素(压机、对中台、磁力分张装置等)进行统一的三维建模, 模型集成了各主要参数, 如机器人底座高度和对中皮带机的尺寸参数等, 对建立好的生产线可以动态模拟, 其运行情况与将要设计的真实生产线基本一致。冲压生产线的虚拟仿真设计避免了传统设计方法对经验的过于依赖和不完善性, 生产线系统自动化程度越高, 柔性越大,设计时考虑的因素越多, 生产线的设计就越复杂,虚拟设计的作用也就越大。
RobotStudio以VirtualController(虚拟)为基础,与机器人在实际生产中运行的软件完全一致。通过RobotStudio可执行十分逼真的模拟,所用均为车间中实际使用的真实机器人程序和配置文件。
NX作为SiemensPLM重要的3D软件解决方案,借助单个易于使用的应用程序,将冲压生产线单台设备从开发概念到构建虚拟样机,同时还能确保所需的质量。NX非常完备,您可以从产品概念开始,逐步开发出高度精确的虚拟样机,而不必使用任何其他软件
3) 在工序数量、设备吨位、工作台等允许的条件下, 冲压件可在各冲压生产线 建立机器人自动冲压生产线虚拟仿真的内容及步骤
济南二机床集团有限公司建立的虚拟制造系统由3 部分组成: 机器人冲压线模型、逻辑控制和仿真控制台。模型指的是反映生产线中设备形状、尺寸、运动学特性等的信息集合,实体模型包括布局信息、各种设备的几何造型和运动学参数。逻辑模型指的是控制冲压线各单元协调运作的指令集合, 本系统中包括机器人运动指令、信号指令、动作指令等。仿真控制台是连接实体模型和逻辑模型的桥梁,它将逻辑模型的指令结合仿真语言驱动实体模型并获取仿线 布局与三维实体模型
根据冲压工艺特征, 机器人自动冲压生产线仿真可以从功能上分为全局和各单元仿真。全局仿真, 主要涉及整个冲压生产线的布局、物流和机械人的运动路径等, 在RobotStudio中建模和运行;单元仿真, 主要涉及单个冲压单元设备的建模和仿真,在NX中建模和运行。单元模型加入到全局中, 使得全局仿真时, 能够直观看到整线的运动情况。
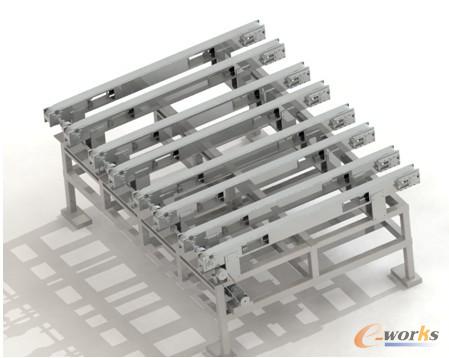
布局是保证冲压线各单元协调动作的前提、单元设备是冲压线组成的基础, 所以先建立布局模型,然后将工厂里各种格式的设备三维模型导入至布局模型中 , 也可以在RobotStudio中重新绘制这些设备的三维模型。冲压单元主要的设备是: 压机、机器人、清洗设备、线首线尾设备等, 然后按照单元的布局将设备组合, 如图1 。
逻辑模型的建立须保证虚拟仿真的真实性和确定的逻辑关系。能协调机器人与压机的工作过程;验证程序的结构与逻辑。程序执行期间,能够直接观察工作单元的I/O状态。可将I/O连接到仿真事件,实现工位内机器人及所有设备的仿线 RAPID语言
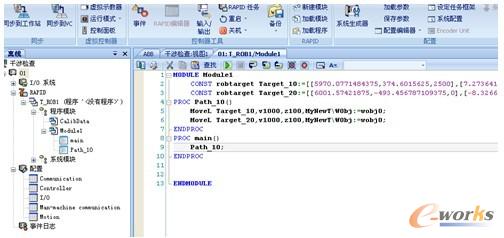
对机器人进行逻辑、运动以及IO控制的一种编程语言RAPID. RAPID语言相似于高级语言编程,与VB和C语言结构相近。所以在了解一般高级语言编程的基础上,便能快速掌握RAPID语言编程。
在RAPID中,提供了丰富的指令的同时,还可以根据自己的需要编制专属的指令集来满足在具体应用中需要,这样一个具有高度灵活性的编程语言为机器人的各种应用提供了无限的潜能。

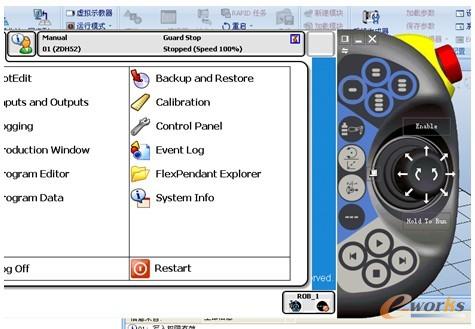
在虚拟仿真中设定虚拟信号模拟实际IO信号。如下图所示设定一个虚拟信号D0_down模拟机器人送料结束,压力机工作可工作信号。

仿真控制台就是连接机器人与人的一个平台。如果需要在仿真模型之外的离线机器人程序中进行优化编程, 结束后就要借助仿真控制台将外部程序的计算结果(如新的机器人运动方案) 导入实际机器人程序中。也可以虚拟操作机器人,对机器人程序进行更改、撰写等。
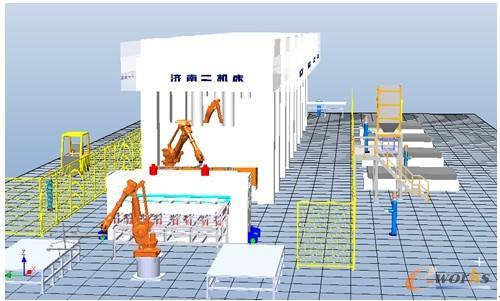
借助虚拟系统对现实生产要素进行计算机的虚拟再现,生产线布局、冲压设备布置、机器人送料状态及虚拟环境中离线验证编程代码等在本地计算机上得到跟车间生产线 虚拟生产环境布局根据冲压件的工艺特性、生产场地和冲压自动化设备等信息, 三维真实的模拟生产环境,对生产过程进行动态模拟, 统计相应评价参数, 对生产环境的布局进行优化。
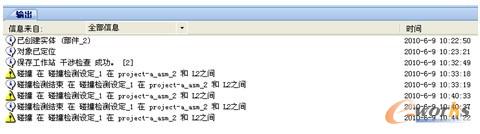
当端拾器(Mynewtool)运动中跟压力机(压力机r5)发生碰撞,系统就会提示发生碰撞及碰撞发生的位置,避免现场调试时发生碰撞,导致设备损坏的事件发生。

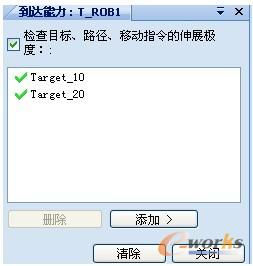
在定义好机器人运动路径后对各个目标点检查端拾器(Mynewtool)可到达性及工具和机器人姿态。
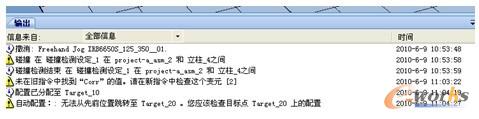
在机器人调试过程中经常发生机器人不能运动的情况,很多没有经验的机器人电气工程师往往会花费数天事件排查线路等,浪费时间后发现问题依然存在,这是因为机器人运动到了死点位置。为避免6轴机器人运动中产生死点,通过仿线轴进行配置保证越过死点位置。
通过虚拟仿真对送料路径中机器人各送料轴角度进行配置,并避免死点发生,同时用最有姿态保证送料工作的完成。通过仿真,将现场使用的程序在虚拟环境中进行验证,到达跟现场一样的效果。
机器人自动冲压生产线虚拟仿真, 最基本的要求是仿真模型的精确。本文所建立的机器人自动冲压生产线虚拟仿真模型,均来源于实际工厂中的实体模型;模型运行所用的参数, 均来源于实际生产中的数据。所以仿真模型是准确可靠的。虚拟仿真控制台的使得仿真模型能够与设计者、管理者进行交互, 实现更多的设计内容和管理内容。生产线的改造和设计, 很大程度上依赖于已有的成功的设计案例。在生产线布局、设备的选择、不同厂家设备的集成等方面, 经验是很重要的。在虚拟仿真系统中, 可以建立相应的专家系统库, 收集来源于实际的或是仿真得出的可行的设计方案和管理方案, 以增强虚拟仿真和设计的智能性。从而更有效、更经济地组织设计生产,以达到产品开发周期和成本的最低化、产品设计质量的最优化和生产效率的最高化,克服企业的封闭性、局限性,缩短生产准备周期,提高产品从设计到制造过程的整体柔性和敏捷性,增强企业的竞争能力。
本文为e-works原创投稿文章,未经e-works书面许可,任何人不得复制、转载、摘编等任何方式进行使用。如已是e-works授权合作伙伴,应在授权范围内使用。e-works内容合作伙伴申请热线:tel/20/21。

广州人工智能与机器人应用产业发展建议制造业人工智能八大应用场景——2021广州市人工智能与机器人应用高峰论坛论文精选十
语音识别智能控制技术应用于养老服务业——2021广州市人工智能与机器人应用高峰论坛论文精选九
龙8手机游戏官网_龙8手机版网页登录官网是国内专业的伺服电动缸厂家,龙8手机游戏官网主要经营伺服电动缸、伺服电缸、高精度电动缸、直连式电动缸、并联式电动缸等设备,种类型号齐全。同时汇聚电动缸行业优秀人才,产品广泛应用于汽车、模具、航空航天等行业。
咨询热线:13905180521

